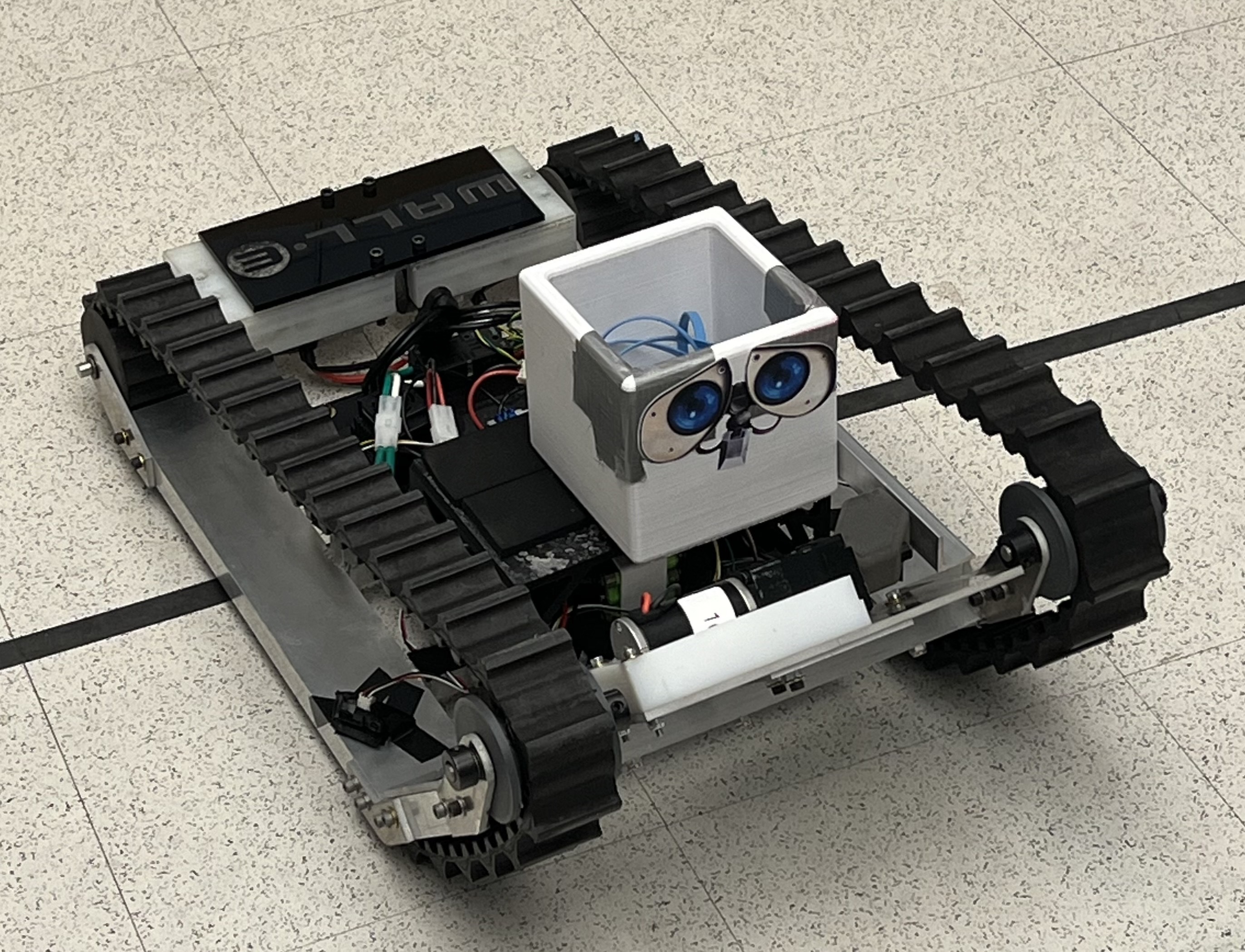
Search and Rescue Robot
For my MAE322 Mechanical Design course’s final project, student-led teams were task to design and manufacture a Search and Rescue Robot, capable of navigating a designated obstacle course set out by the instructors. As the sole member of my team with previous programming and electrical knowledge, I led our team to be the first in course history to be able to complete the course fully autonomously. I chose to use low-level sensors and designed the code on the Teensy microcontroller to use only minimal control-theory concepts to make the project replicable within the scope of the project for future students to learn from without requiring extended knowledge.
The full code can be found on my github page, alongside a video demonstration!